Integration
This section describes how to integrate solutions, built with perClass Mira, into custom applications running camera acquisition and data processing.
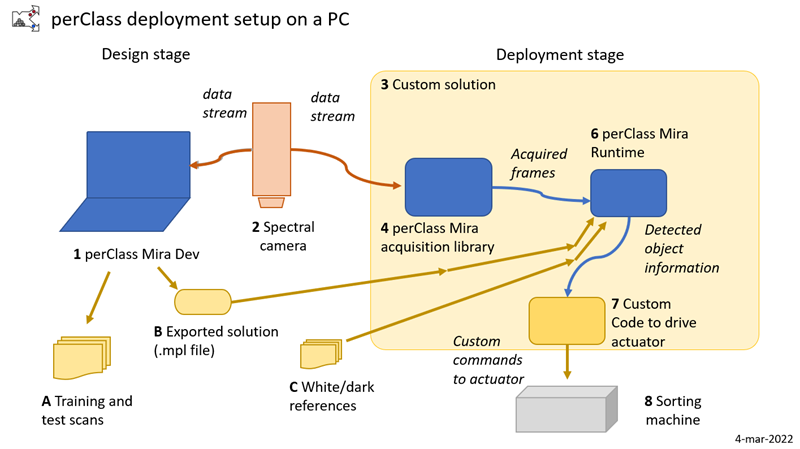
The scheme below describes the modules involved. While perClass software components are rendered in blue, the spectral sensor in red and customer-specific parts in yellow.
The left side depicts the Design stage where perClass Mira Dev user-interface (1) to connect to a spectral camera (2). From the user interface, we can record scans (A) used for training and testing the models. Once the solution is built and properly validated, it may be exported into "Mira PipeLine" MPL file (B).
Then, we may proceed to the Deployment stage on the right side. There, we wish to run an industrial sorting machine (8) with the camera (2) in a tight control loop. This loop is executed on a PC in a custom solution (3). This is an application that reads data from the sensor (2) using perClass Mira Camera API (4) and processes this data with perClass Mira Runtime API (6).
The runtime (6) loads the exported MPL solution (B). This solution typicallt contains a classifier able to identify objects. Objects are detected by the Runtime (6) and their details such as size, centroind position and class are passed to a custom code (7). This module translates the coordinates from pixels (across the belt) and frames (along the belt) to machine-specific coordinates and drives the actuators.
Commented example of acquisition from Camera API is available here.